*Werbung / Affiliate 
*Werbung / Affiliate 
Bus-Systeme
Systemanalyse
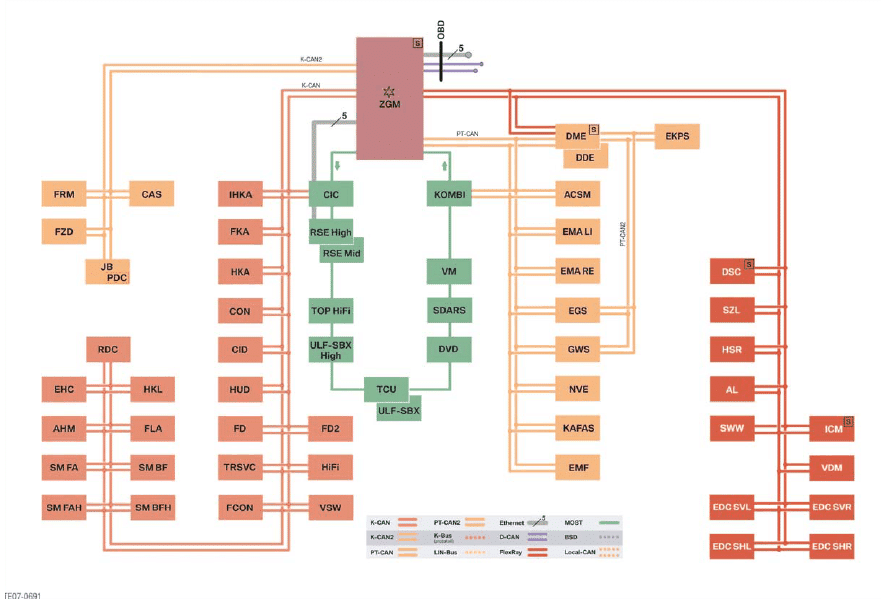
Die elektronischen Steuergeräte im Fahrzeug sind über ein Netzwerk miteinander verbunden. In diesem Systemverbund spielt das zentrale Gateway-Modul eine entscheidende Rolle. Das zentrale Gateway-Modul ist dafür verantwortlich, dass Informationen von einem Bus-System in ein anderes Bus-System übertragen werden.
Motorsteuerung und Fahrwerkregelsysteme sind über das PT-CAN (bzw. PT-CAN2) und das FlexRay Bus-System mit dem ZGM verknüpft. Die Steuergeräte der allgemeinen Fahrzeugelektrik sind über das K-CAN und das K-CAN2 verbunden.
Für die meisten Steuergeräte im Bereich der Informations- und Kommunikationstechnologien steht der MOST als Informationsträger zur Verfügung. Die Fahrzeugdiagnose kommuniziert über das D-CAN. Das Programmieren/Kodieren des Fahrzeuges erfolgt über den Ethernet-Zugang. Das Gesamtnetzwerk besteht aus verschiedenen Bus-Systemen, die die Kommunikation zwischen den einzelnen Steuergeräten gewährleisten.
Übersicht der Bus-Systeme
Prinzipiell werden zwei Gruppen von Bus-Systemen unterschieden:
-> Hauptbus-Systeme: Ethernet, FlexRay, K-CAN, K-CAN2, MOST, PT-CAN und PT-CAN2
-> Sub-BUS-Systeme: BSD, D-CAN (Diagnose-CAN), LIN, Local-CAN
Karosserie-CAN K-CAN
Der K-CAN ist für die Kommunikation der Bauteile mit geringer Datenübertragungsrate zuständig. Über das zentrale Gateway-Modul ist der K-CAN auch mit den anderen Bus-Systemen verknüpft. Einige Steuergeräte im K-CAN besitzen einen LIN-Bus als Sub-Bus. Der K-CAN hat eine Datenübertragungsrate von 100kBit/s und ist zweiadrig verdrillt (zwei verdrillte Adern) ausgeführt. Der K-CAN hat die Möglichkeit, im Fehlerfall als Eindrahtbus betrieben zu werden.
Karosserie-CAN2 K-CAN2
Der K-CAN2 ist für die Kommunikation der Steuergeräte mit hoher Datenübertragungsrate zuständig. Über das zentrale Gateway-Modul ist der K-CAN2 auch mit den anderen Bus-Systemen verknüpft. An allen Steuergeräten im K-CAN2 ist ein LIN-Bus als Sub-Bus angeschlossen. Der K-CAN2 hat eine Datenübertragungsrate von 500kBit/s und ist zweiadrig verdrillt ausgeführt.
Powertrain-CAN PT-CAN
Der PT-CAN verbindet die Motorsteuerung mit der Getriebesteuerung, aber auch Systeme im Bereich der Sicherheits- und Fahrerassistenzsysteme miteinander. Er ist linienförmig mit Stichleitungen zu den einzelnen Systemen aufgebaut. Der PT-CAN hat eine Datenübertragungsrate von 500kBit/s und ist zweiadrig verdrillt ausgeführt.
Powertrain-CAN2 PT-CAN2
Der PT-CAN2 bildet eine Redundanz zum PT-CAN im Bereich der Motorsteuerung und dient auch der Signalübermittlung an die Kraftstoffpumpensteuerung. Der PT-CAN2 hat eine Datenübertragungsrate von 500kBit/s und ist zweiadrig mit zusätzlicher Wake-up-Leitung ausgeführt.
Ethernet
Ethernet ist eine herstellerneutrale, kabelgebundene Netzwerktechnologie. Als Übertragungsprotokolle werden die Protokolle TCP/IP (Transmission Control Protocol/ Internet Protocol) und UDP (User Datagramm Protocol) verwendet.
FlexRay
Mit einer maximalen Datenübertragungsrate von 10 MBit/s pro Kanal ist FlexRay deutlich schneller als die bisher in Kraftfahrzeugen eingesetzten Datenbusse im Bereich Karosserie und Antrieb/Fahrwerk. Das zentrale Gateway-Modul stellt die Verbindung zwischen den verschiedenen Bus-Systemen und dem FlexRay her. Je nach Ausrüstungsstand des Fahrzeuges sind im ZGM ein oder zwei so genannte Sternkoppler mit jeweils vier Bustreibern vorhanden. Die Bustreiber leiten die Daten der Steuergeräte über den Communication-Controller zum zentralen Gateway-Modul (ZGM) weiter. Die deterministische Datenübertragung stellt sicher, dass jede Botschaft im zeitgesteuerten Teil in Echtzeit übertragen wird. Echtzeit bedeutet, dass die Übertragung in einer festgelegten Zeit erfolgt.
MOST-Bus-System
MOST ist eine Datenbustechnologie für Multimedia-Anwendungen. Der MOST-Bus nutzt Lichtimpulse zur Datenübertragung und ist in Ringstruktur aufgebaut. Die Datenübertragung im Ring findet dabei nur in eine Richtung statt. Nur das zentrale Gateway-Modul kann einen Datenaustausch zwischen dem MOST-Bus und anderen Bus-Systemen realisieren. Als Master-Steuergerät fungiert der Car Information Computer, das Gateway zum restlichen Bus-System ist das zentrale Gateway-Modul.
LIN-Bus
Der Local-Interconnect-Network-Bus (LIN-Bus) ist ein für die Automobilindustrie standardisierter, serieller Eindrahtbus (ein Eindrahtbus hat nur eine Leitung). Die Datenübertragungsrate des LIN-Busses reicht von 9,6 kBit/s bis 20,0 kBit/s.
Beschreibung Busdiagnose
Funktionsbeschreibung siehe Fahrzeugtechnik Diagnose (FTD):
Kurzbeschreibung:
Der Datenaustausch der Steuergeräte erfolgt über verschiedene Bus-Systeme mit unterschiedlichen Leistungsmerkmalen. Diese Bus-Systeme sind über so genannte Gateways miteinander verbunden. Aufgabe dieser Gateways ist es, Daten zwischen den angeschlossenen Bus-Systemen auszutauschen. Die Bus-Struktur ist in nebenstehendem Systemschaltplan dargestellt.
Den einzelnen Bussen sind folgende Funktionsbereiche im Fahrzeug zuzuordnen:
| – PT-CAN: Steuergeräte im Bereich Antrieb und Fahrwerk
– K-CAN: Steuergeräte im Bereich der Karosserieelektronik (E65: K-CAN-System und K-CAN Peripherie) – F-CAN: Steuergeräte im Bereich der Fahrwerkselektronik (nicht E65) – Local-CAN: Peripherie-Steuergeräte im Bereich Antrieb – byteflight: Airbag-Steuergeräte (E65, E60) – MOST: Steuergeräte im Bereich Audio und Kommunikation |
Wenn in diesem Kommunikationsverbund Fehler auftreten, werden in den beteiligten Steuergeräten Fehlerspeichereinträge erzeugt. Dabei kann normalerweise unterschieden werden zwischen Leitungsfehlern und logischen Fehlern wie z. B. fehlenden Nachrichten. Zu beachten ist, dass eine Fehlerursache im Allgemeinen mehrere Fehlerspeichereinträge in verschiedenen Steuergeräten zur Folge hat.
Folgende Fehlerursachen können zu Bus-Fehlern führen:
| – Kurzschluss einer Bus-Leitung
– Unterbrechung einer Bus-Leitung – Fehler in einem Gateway – Fehler im Sende- oder Empfangsteil eines Steuergeräts |
Das vorliegende Testmodul bewertet die Gesamtheit aller Fehlerspeichereinträge. Die Auswertung der Kombination der vorliegenden Fehlerspeichereinträge liefert die wahrscheinlichste Fehlerursache. Die Analyse ist auf die CAN-Systeme und byteflight-Systeme (E65, E60) beschränkt.
Wenn im Fahrzeug eine Unterspannungssituation vorgelegen hat, können ebenfalls (fälschlicherweise) Bus-Fehler eingetragen sein. Prüfen, ob in mehreren Steuergeräten ein Unterspannungsfehler abgelegt ist. Wenn das der Fall ist, auf die weitere Auswertung der Bus-Fehler verzichten, die Fehlerursache ist im Bereich der Spannungsversorgung zu suchen.
Prüfung Bus-Signal CAN-Bus
Verwendete Kabel
Multifunktionskabel
Prüfhinweise
- Spannungsprüfung (Oszilloskop): Voraussetzung für die Spannungsprüfung ist, dass die Batterie angeklemmt und die Zündung eingeschaltet ist.
- Widerstandsmessung: Bei der Widerstandsmessung muss der untersuchende Prüfling vor der Messung stromlos geschaltet werden. Zu diesem Zweck wird die Fahrzeugbatterie abgeklemmt. Etwa 3 Minuten warten, bis sich alle Kondensatoren im System entladen haben.
Informationen zum CAN-Bus
Das CAN (Controller Area Network) Bus-System ist ein lineares Bus-System und zeichnet sich durch folgende Merkmale aus:
- Die Signalausbreitung erfolgt in beide Richtungen.
- Eine Botschaft empfangen alle Bus-Teilnehmer. Jeder Bus-Teilnehmer entscheidet für sich, ob er die Botschaft verwertet.
- Zusätzliche Bus-Teilnehmer lassen sich durch einfaches Parallelschalten einfügen.
- Das Bus-System bildet ein Multimaster-System. Jeder Bus-Teilnehmer kann Master oder Slave sein, je nachdem, ob er als Sender oder Empfänger geschaltet ist.
- Das Übertragungsmedium ist eine Zweidrahtverbindung. Die Bezeichnungen der Leitungen: CAN-Low und CAN-High
- Grundsätzlich kann jeder Bus-Teilnehmer über den Bus mit allen anderen Bus-Teilnehmern kommunizieren. Über ein Zugriffsverfahren wird der Datenaustausch auf dem Bus geregelt. Der Hauptunterschied zwischen dem Datenbus K-CAN (Karosserie-CAN), PT-CAN (Powertrain-CAN) und dem F-CAN (Fahrwerks-CAN) ist:
- K-CAN: Datenübertragungsrate etwa 100 kBits/s. Eindrahtbetrieb möglich.
- PT-CAN: Datenübertragungsrate etwa 500 kBits/s. Kein Eindrahtbetrieb möglich.
- F-CAN: Datenübertragungsrate etwa 500 kBits/s. Kein Eindrahtbetrieb möglich
Master: Der Master ist der aktive Kommunikationspartner, von dem die Initiative für die Kommunikation ausgeht. Der Master hat die Herrschaft über den Bus und steuert die Kommunikation. Der Master kann den passiven Bus-Teilnehmern (Slave) im Bus-System Botschaften zusenden und nach Aufforderung von ihnen Botschaften empfangen.
Slave: Der Slave ist ein passiver Kommunikationsteilnehmer. Der Slave wird aufgefordert, Daten zu empfangen und zu senden.
Multimaster-System: In einem Multimaster-System können alle Kommunikationsteilnehmer zu einer bestimmten Zeit die Rolle eines Masters oder Slave übernehmen.
Oszilloskopmessung K-CAN, PT-CAN, F-CAN
Um sich Klarheit zu verschaffen, ob der CAN-Bus einwandfrei arbeitet, muss die Kommunikation auf dem Bus beobachtet werden. Hierbei müssen nicht die einzelnen Bits analysiert werden, sondern lediglich beobachtet werden, ob der CAN-Bus arbeitet. Die Oszilloskopmessung sagt aus: „Der CAN-Bus arbeitet wahrscheinlich ohne Störung“.
Wenn man mit dem Oszilloskop die Spannung zwischen der Leitung CAN-Low (bzw. CAN-High) und Masse misst, dann erhält man ein rechteckähnliches Signal in folgenden Spannungsgrenzen:
- K-CAN:CAN-Low gegen Masse: U min = 1 Volt und U max = 5 VoltCAN-High gegen Masse: U min = 0 Volt und U max = 4 Volt
Diese Werte sind Näherungswerte und können je nach Last auf dem Bus um einige 100 mV abweichen.
Einstellungen Oszilloskop für die Messung am K-CAN:
| CH1: | Tastspitze 1, Range 2 V/Div; Coupling DC |
| CH2: | Tastspitze 2, Range 2 V/Div; Coupling DC |
| Time: | 50 µs/Div |
Grafik 1: Messung K-CAN: CH1 CAN-Low, CH2 CAN-High
Wenn man mit dem Oszilloskop die Spannung zwischen der Leitung CAN-Low (bzw. CAN-High) und Masse misst, dann erhält man ein rechteckähnliches Signal in folgenden Spannungsgrenzen:
- PT-CAN und F-CANCAN-Low gegen Masse: U min = 1,5 Volt und U max = 2.5 VoltCAN-High gegen Masse: U min = 2,5 Volt und U max = 3,5 Volt
Diese Werte sind Näherungswerte und können je nach Last auf dem Bus um einige 100 mV abweichen.
Einstellungen Oszilloskop für die Messung am PT-CAN (bzw. F-CAN):
| CH1: | Tastspitze 1, Range 1 V/Div; Coupling DC |
| CH2: | Tastspitze 2, Range 1 V/Div; Coupling DC |
| Time: | 10 µs/Div |
Grafik 2: Messung PT-CAN: CH1 CAN-Low, CH2 CAN-High
Vorgehen für Widerstandsmessung mit Abschlusswiderstand K-CAN, PT-CAN und F-CAN
Prüfablauf für Widerstandsmessung:
- Der CAN-Bus muss stromlos sein.
- Es dürfen keine weiteren Messgeräte (Parallelschaltung von Messgeräten) verwendet werden.
- Die Messung erfolgt zwischen den Leitungen CAN-Low und CAN-High.
- Die Istwerte dürfen sich von den Sollwerten um einige Ohm unterscheiden.
K-CAN
Am Datenbus K-CAN kann keine definierte Widerstandsmessung durchgeführt werden, da der Widerstand je nach interner Schaltlogik der Steuergeräte variiert.
PT-CAN, F-CAN
Zur Vermeidung von Signalreflexionen werden 2 CAN-Bus-Teilnehmer (mit den größten Entfernungen im Netzwerk PT-CAN) jeweils mit 120 Ohm abgeschlossen. Die beiden Abschlusswiderstände sind parallel geschaltet und bilden einen Ersatzwiderstand von 60 Ohm. Bei abgeschalteter Versorgungsspannung kann dieser Ersatzwiderstand zwischen den Datenleitungen gemessen werden. Zudem können die Einzelwiderstände getrennt voneinander gemessen werden.
Hinweis für die Messung mit 60 Ohm: Ein leicht zugängliches Steuergerät vom Bus zu trennen. Dann am Stecker den Widerstand zwischen den Leitungen CAN-Low und CAN-High messen.
Hinweis!
Nicht alle Fahrzeuge verfügen über einen Abschlusswiderstand am CAN-Bus. Anhand des entsprechenden Schaltplans kann geprüft werden, ob beim angeschlossenen Fahrzeug ein Abschlusswiderstand eingebaut ist.
CAN-Bus ohne Funktion
Wenn der Datenbus K-CAN oder PT-CAN ohne Funktion ist, liegt möglicherweise ein Kurzschluss oder eine Unterbrechung an der Leitung CAN-Low bzw. CAN-High vor. Oder ein Steuergerät ist defekt.
Um die Fehlerursache zu lokalisieren, ist folgende Vorgehensweise empfohlen:
- Bus-Teilnehmer am CAN-Bus nacheinander abstecken, bis der Fehlerverursacher (= Steuergerät X) gefunden wurde.
- Die Leitungen zum Steuergerät X auf Kurzschluss oder Unterbrechung prüfen.
- Wenn möglich, das Steuergerät X prüfen.
- Diese Vorgehensweise führt aber nur dann zum Erfolg, wenn eine Stichleitung von einem Steuergerät zum CAN-Bus einen Kurzschluss hat. Wenn eine Leitung im CAN-Bus selbst einen Kurzschluss hat, so muss der Kabelbaum überprüft werden.
Druckfehler, Irrtümer und technische Änderungen vorbehalten.
Mögliche Fehlerursachen für den LIN-Bus:
- Fehlerhafte Spannungsversorgung oder Masseverbindung bei den betroffenen Komponenten am LIN-Bus
- Fehlerhafter Slave am LIN-Bus
- Fehlerhaftes Master-Steuergerät
- Kurzschluss nach Plus oder Masse der LIN-Bus-Leitung
- Leitungsunterbrechung oder fehlerhafte Steckverbindung
Vor der Fehlersuche ist eine Funktionsprüfung am betroffenen LIN-Bus durchzuführen.
Nach Schaltplan eine Funktionsprüfung zwischen den Teilnehmern am LIN-Bus durchführen:
- Statusabfrage durchführen
- Ansteuerung des Tasters durchführen
Wenn die Statusabfrage oder die Ansteuerung erfolgreich ist, kann von einer fehlerfreien Kommunikation auf dem LIN-Bus ausgegangen werden. In diesem Fall ist keine weitere Fehlersuche am betroffenen LIN-Bus nötig.
Fehlersuche bei fehlerhafter Kommunikation auf dem LIN-Bus (Funktionsprüfung ist fehlerhaft):
- Spannungsversorgung und Masse prüfenNach Schaltplan Spannungsversorgung und Masseverbindung der betroffenen Komponenten am LIN-Bus prüfen, (Master und Slave).
- Oszilloskopmessung nach Schaltplan durchführen. Prüfung (Master-Steuergerät).
Übersicht über die BMW Datenbusse
Die vorliegende Übersicht über die BMW Datenbusse ist gegliedert in 3 Tabellen:
- Haupt-Busse
- Sub-Busse (lokale Datenbusse)
- sonstige Datenleitungen
Einige Busse werden sowohl als Haupt-Busse als auch als Sub-Busse verwendet, z. B. der I-Bus. Diese Busse werden in der folgenden Tabelle zweimal aufgeführt: bei den Haupt-Bussen und bei den Sub-Bussen.
Die Tabellen sind alfabetisch sortiert.
– Haupt-Busse
| Bezeichnung des Busses |
Erklärung | Funktion | Bus-Struktur | Bitrate | Bau-reihe |
|---|---|---|---|---|---|
| Bitrate: Datenübertragungsrate
* Weiteres im Abschnitt „Häufig gestellte Fragen“ ** LWL: Lichtwellenleiter Druckfehler, Änderungen und technische Irrtümer vorbehalten. Stand: September 2007 |
|||||
| byteflight | Bus für das passive Sicherheitssystem | Der byteflight überträgt sicherheitskritische Daten (Airbag).
Der byteflight sendet synchron und asynchron. * |
Stern *
LWL ** |
10 MBit/s | E60
E61 E63 E64 bis 09/2005
E65 E66 |
| CAN * | Controller Area Network | Der CAN wurde ursprünglich von der Robert Bosch entwickelt.
CAN-Busse werden in vielen Bereichen verwendet. * |
Bus * | entweder schnell (High-Speed) oder etwas langsamer (Low-Speed) * | E38
E39 E52 E53 |
| I-Bus | Instrumentierungs-Bus | Der I-Bus verbindet die Steuergeräte für Information und Kommunikation.
Der I-Bus ist ein BMW Standard mit niedriger Bitrate. |
Linear *
Eindraht |
9,6 kBit/s | E38
E39 E53 |
| K-Bus | Karosserie-Bus | Der K-Bus verbindet die Steuergeräte für die Karosserie-Elektronik.
Der K-Bus ist ein BMW Standard mit niedriger Bitrate. |
Linear *
Eindraht |
9,6 kBit/s | E38
E39 E46 E52 E53 E83 E85 E86 R50 R52 R53 |
| K-CAN * | Karosserie-Controller-Area-Network | CAN ist ein Bus-Standard. Bei BMW gibt es 3 Busse mit diesem Standard:
F-CAN K-CAN PT-CAN |
Linear *
Zweidraht |
100 kBit/s * | E46
E60 E61 E63 E64 E70 E81 E82 E83 E85 E86 E87 E90 E91 E92 E93 R55 R56 |
| K-CAN P | Karosserie-Controller-Area-Network PERIPHERIE | K-CAN P und K-CAN S sind die beiden CAN-Busse für die Karosserie-Elektronik.
Beim E65, E66 wurde der K-CAN auf 2 Busse aufgeteilt: K-CAN P und K-CAN S. Zur Sicherheit sind Systeme in Crash-Bereichen am K-CAN P. |
Linear *
Zweidraht |
100 kBit/s | E65
E66 |
| K-CAN S | Karosserie-Controller-Area-Network SYSTEM | siehe oben | Linear *
Zweidraht |
100 kBit/s | E65
E66 |
| MOST | Media Oriented System Transport | Der MOST-Bus überträgt die Daten für Kommunikation und Information im Fahrzeug | Ring *
LWL ** |
22,5 MBit/s | E60
E61 E63 E64 E65 E66 E70 E81 E82 E87 E90 E91 E92 E93 R55 R56 |
| P-Bus | Peripherie-Bus | Der Peripherie-Bus verbindet die Steuergeräte in den Türen, im Schiebehebedach und im Fahrersitz mit dem Grundmodul.
Der P-Bus ist ein BMW Standard (wie der K-Bus). * |
Linear * | 9,6 kBit/s | E38
E39 E53 |
| PT-CAN | Powertrain Controller Area Network | Der PT-CAN vernetzt die Steuergeräte für die Systeme in den Bereichen Antrieb und Fahrwerk. | Linear *
Zweidraht |
500 kBit/s | E46
E60 E61 E63 E64 E65 E66 E70 E81 E82 E83 E85 E86 E87 E90 E91 E92 E93 R50 R52 R53 R55 R56 |
– Sub-Busse *
| Bezeichnung des Sub-Busses | Erklärung | Funktion | Bus-Struktur | Bitrate | Bau-reihe |
|---|---|---|---|---|---|
| Bitrate: Datenübertragungsrate
* Weiteres im Abschnitt „Häufig gestellte Fragen“ Druckfehler, Änderungen und technische Irrtümer vorbehalten. Stand: September 2007 |
|||||
| ARCNET | Attached Resources Computer Network | ARCNET ist die Datenleitung zwischen NAV-Steuergerät und VM-Steuergerät (NAV: Navigationssystem; VM: Videomodul). | Linear *
Eindraht |
2,5 Mbit/s | E38
E39 bis 1997 |
| CAN-Low Motor | Karosserie-Controller-Area-Network Low-Speed | CAN-Bus von der DME zur VTC (d. h. Steuergerät der Valvetronic) | Linear *
Zweidraht |
100 kBit/s | E46
E53 E60 E61 E63 E64 E83 E85 E86 |
| Drosselklap-pen-CAN | — | CAN-Bus von der DME zur Drosselklappe | Linear *
Zweidraht |
500 kBit/s | M5/
S85 |
| F-CAN | Fahrwerks-Controller-Area-Network | Der F-CAN überträgt Daten zwischen den Regelsystemen für das Fahrwerk. | Linear *
Zweidraht |
10 MBit/s | E60
E61 E63 E64 E70 E81 E82 E87 E90 E91 E92 E93 R55 R56 |
| FlexRay* | FlexRay-Bus-System
(Industriestan-dard) |
FleyRay stellt die Verbindung zwischen VDM-Steuergerät und den Dämpfersatelliten her. | Stern *
Zweidraht |
10 MBit/s | E70 |
| I-Bus * | Instrumentierungs-Bus | Der I-Bus verbindet die Steuergeräte MRS und TCU.
Der I-Bus ist ein BMW Standard. |
Linear *
Eindraht |
9,6 kBit/s | E81
E82 E87 E90 E91 E92 E93 |
| I-Bus Japan * | Instrumentierung-Bus Japan | Der I-Bus Japan verbindet die Steuergeräte für Information und Kommunikation. * | Linear *
Eindraht |
9,6 kBit/s | E65
E66 E90 E91 E92 E93 |
| K-Bus * | Karosserie-Bus | Der K-Bus verbindet die Steuergeräte für die Karosserie-Elektronik. Beispiel: DWA und SINE oder CAS und TAGE (CAS und TAGE nur bei E60). | Linear *
Eindraht |
9,6 kBit/s | E60
E61 E63 E64 E70 E83 E85 E86 E87 E90 E91 E92 E93 R56 |
| Leerlaufsteller-SMG-CAN | — | CAN-Bus zwischen Leerlaufsteller, SMG und DME | Linear *
Zweidraht |
500 kBit/s | M5/S85 |
| LIN-Bus * | Local-Interconnect-Network-Bus | Der LIN-Bus ist ein eigener Bus-Standard.
Der LIN-Bus überträgt kleine Datenmengen, z. B. bei Schaltern und Sensoren. |
Linear *
Eindraht |
2,4 kBit/s
9,6 kBit/s oder 19,2 kBit/s sind möglich |
E60
E61 E63 E64 E70 E81 E82 E87 E90 E91 E92 E93 R55 R56 |
| Local-CAN | Local-Controller-Area-Network | Der Local-CAN wird zur Kommunikation zwischen Steuergeräten im Bereich „Antrieb“ eingesetzt. Der Local-CAN ist ein CAN-Bus zwischen 2 Steuergeräten. | Linear *
Zweidraht |
500 kBit/s | E60
E61 E63 E64 E65 E66 E70 E85 E86 |
| NAV-Bus | Navigations-Bus | Sub-Bus zwischen Navigationssystem (NAV) und Multi-Informations-Radio (MIR). | Linear *
Eindraht |
2,5 MBit/s | E52 |
| Private-CAN | Private Controller Area Network | Der Private-CAN verbindet das DDE-Master-Steuergerät mit dem DDE-Slave-Steuergerät. | Linear *
Zweidraht |
500 kBit/s | E65
E66 |
| S-CAN | Sensor-CAN | Der S-CAN verbindet das LDM-Steuergerät mit dem Fernbereichssensor (LRR) und den beiden Nahbereichssensoren | Linear *
Zweidraht |
500 kBit/s | E60
E61 E63 E64 |
| Tel-Commander-CAN | Telefon Commander Karosserie-Controller-Area-Network | ein weiterer Sub-Bus im System „Telefon“ | Linear *
Zweidraht |
100 kBit/s | E65
E66 |
– Weitere Datenschnittstellen
| Bezeichnung des Busses |
Erklärung | Funktion | Bus-Struktur | Bitrate | Bau-reihe |
|---|---|---|---|---|---|
| Bitrate: Datenübertragungsrate
* LWL: Lichtwellenleiter ** Weiteres im Abschnitt „Häufig gestellte Fragen“ Druckfehler, Änderungen und technische Irrtümer vorbehalten. Stand: September 2007 |
|||||
| BSD | Bitserielle Datenschnittstelle | Die bitserielle Datenschnittstelle ist eine einfache Datenleitung für kleine Datenmengen. | kein Bus | 9,6 kBit/s | E46
E53 E60 E61 E63 E64 E70 E81 E82 E83 E85 E86 E87 E90 E91 E92 E93 R55 R56 |
| D-CAN** | Diagnose-on-CAN | D-CAN ist eine neue Diagnoseschnittstelle mit neuem Kommunikations-Protokoll (löst die bisherige OBD-Schnittstelle ab). D-CAN überträgt Daten zwischen dem Fahrzeug und dem BMW Diagnose-system. |
kein Bus | Die Diagnose kann mit 500 kBit/s betrieben werden. | E60
E61 E63 E64 E70 E81 E82 E83 E87 E90 E91 E92 E93 R55 R56 |
| K-Line | Diagnoseleitung | Die Diagnoseleitung überträgt Daten zwischen dem Fahrzeug und dem BMW Diagnosesystem („K-Line“ ist teilweise auch als „K-Leitung“ bekannt). | kein Bus | Die Diagnose kann mit 10,4 oder mit 115 kBit/s betrieben werden.
(Für On-Board-Diagnose 10,4 kBit/s, z. B. bei Daten für die Abgasnorm) |
E38
E83 E60 E61 E63 E64 E65 E66 E87 E90 E91 E92 E93 |
| TxD1 | Datenleitung für die Diagnose | Datenleitung für die Diagnose der nichtabgasrelevanten Steuergeräte
(„TxD“ kommt von „Transmit Data“, d. h. Sendedaten“ |
kein Bus | — | E38
E39 E46 E52 E53 E83 E85 E86 R50 R52 R53 |
| TxD2 | Datenleitung für die Diagnose | Datenleitung für die Diagnose der abgasrelevanten Steuergeräte (z. B. DME: Digitale Motor Elektronik und EGS: Elektronische Getriebesteuerung) | kein Bus | — |
E38 E39 E46 E52 E53 E83 E85 E86 R50 R52 R53 |